Aiz priekškara: ksilofona robots v3
Pirmā versija bija mehāniski neveiksmīgs prototips, kur viss bija mehāniska kļūda un strupceļš, un tikai GI robota sejiņa ļāva priecāties par random notis sitošo uzparikti,
Otrā versija bija cnc-mašīnas veida iterācija, kura jau vairāk sāka atgādināt mehānismu, kādu es gribētu varēt izveidot.
Un tagad, laba universitātes pasniedzēja mudināta, top trešā iterācija. Lai tiktu pie ātruma, mēlītes būs pus-aplī, un vidū būs rotējoša platforma. Lielais galamērķis ir panākt, lai varētu nosvilpot/nodungot melodiju, un robotiņš pats to nospēlētu. Gan mehānika, gan signālu apstrāde!
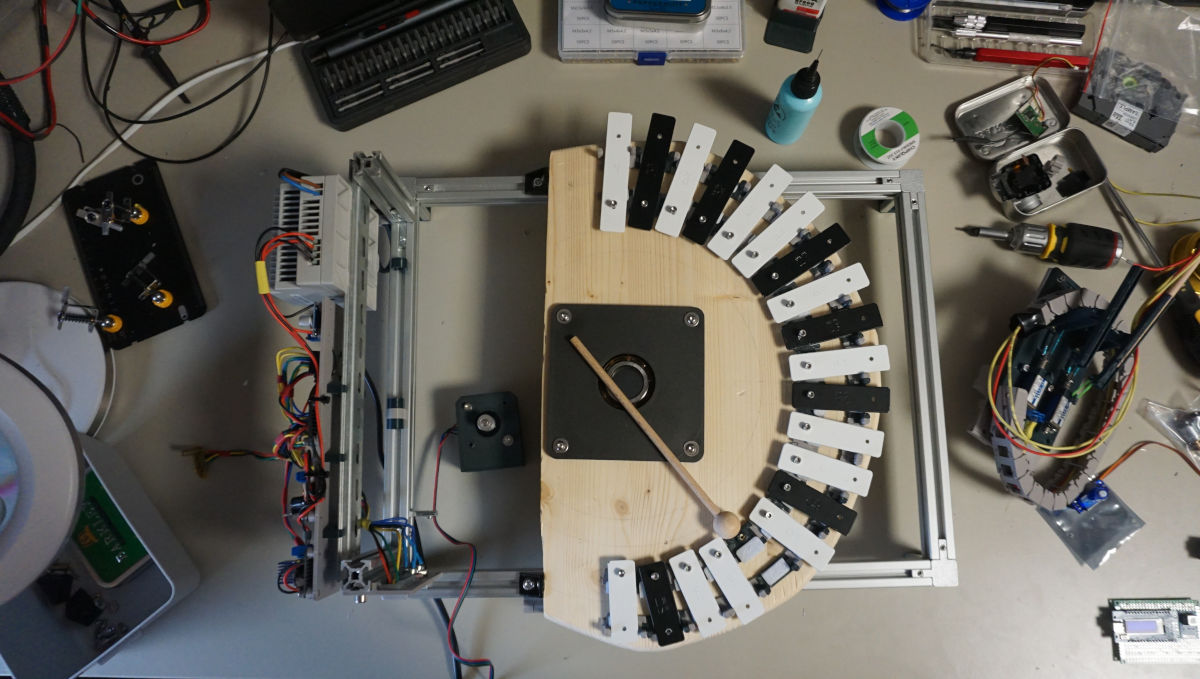
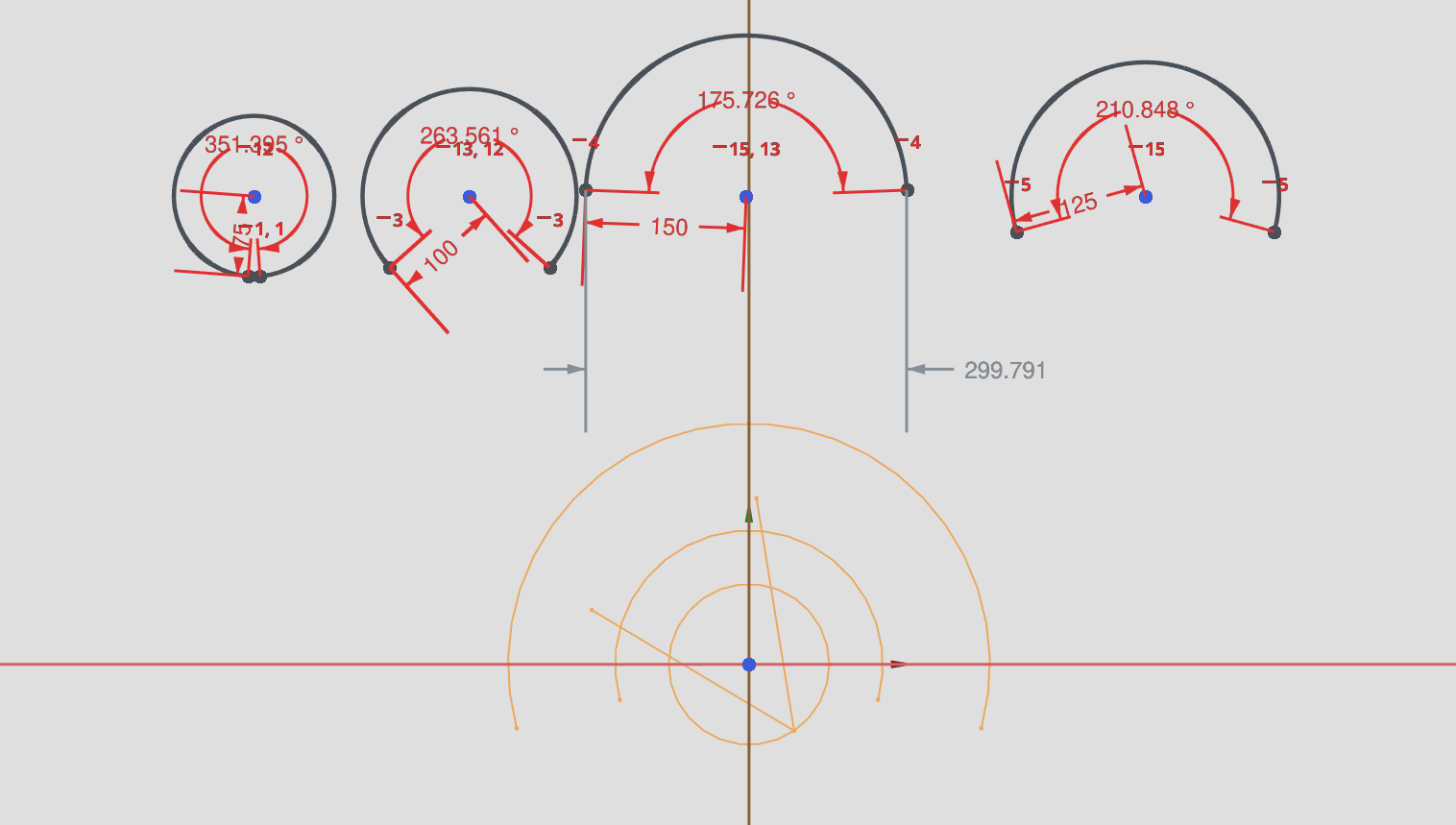
FreeCAD bija noderīgs ne tikai, lai uzmodelētu drukājamās detaļas, bet arī lai vispār izdomātu, cik lielā lokā veidot jauno ksilofona iterāciju. Apsvēru gan to, lai iekārta neaizņemtu pārmērīgi daudz vietas, lai pietiktu vietas rotējošajai platformai ar vālītēm.
Pamatplati izveidoju no koka, pieļaujot laikam jau it visas iespējamās kļūdas. Tā praktiski un patstāvīgi atklāju to, kapēc, sazāģējot dēli, nevajag ļaut zāģējamajai daļai brīvi nokrist, vai, kapēc urbjot caurumus, ļoti vēlams urbt donora dēlītī.
Visi nelielie nesmukumi gan noslēpušies koka plates apakšā, un nofrēzētās malas ne pārāk līdzenajam pusaplim piešķir zināmu daiļamatniecības meistaru šarmu.
Lai izvietotu mēlītes precīzos leņķos, uzmodelēju pužļa veidā saklikšķināmus gabaliņus, kas saklikšķ vajadzīgajā ģeometrijā. Tas izrādījās ārkārtīgi ērti. Bija nepieciešamas vairākas iterācijas, līdz nonācu pie gana robusta risinājuma, kurš
a) ļauj mēlītēm skanēt,
b) ir ērti saliekams,
c) nav trausls.
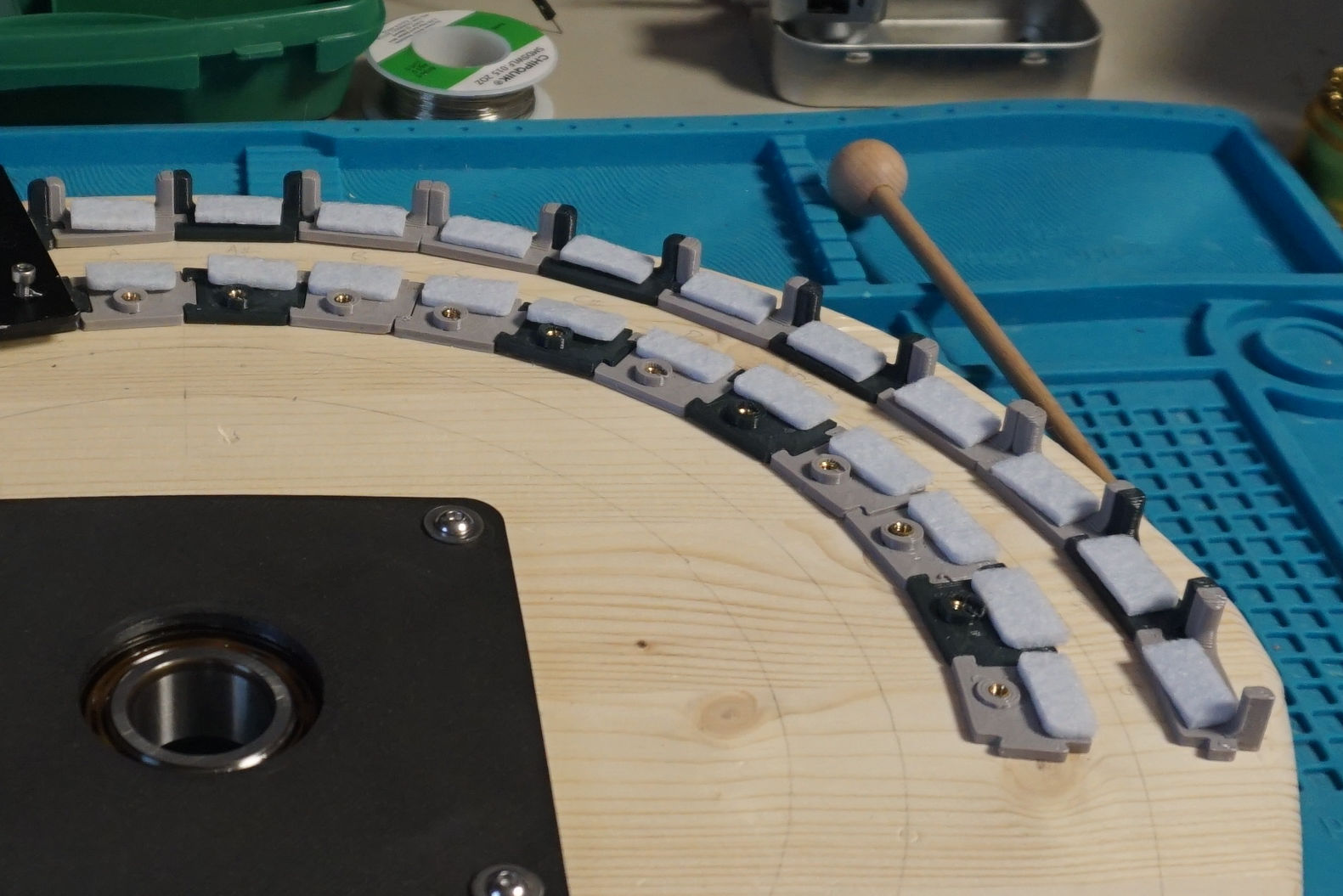
Mēlīšu skanēšana bija netriviāls jautājums — oriģinālajam ksilofonam mēlītes pieturēja biezas gumijas “nagliņas”, kuras aizvietot man neizdevās. Pēc vairākiem mēģinājumiem, paliku pie tā, ka maaaaazdrusciņ ar dremeli pafrēzēju mēlīšu caurumus lielākus, lai M3 skrūvīte tiem ietu cauri brīvi, tos pieturot, un pašas mēlītes guļ uz uzlīmētiem voiloka gabaliņiem. Skan, bet jāsit diezgan maigi: šķiet, ka vajadzēt modulēt solenoīdus, lai nesit kā ar stipru āmuru.
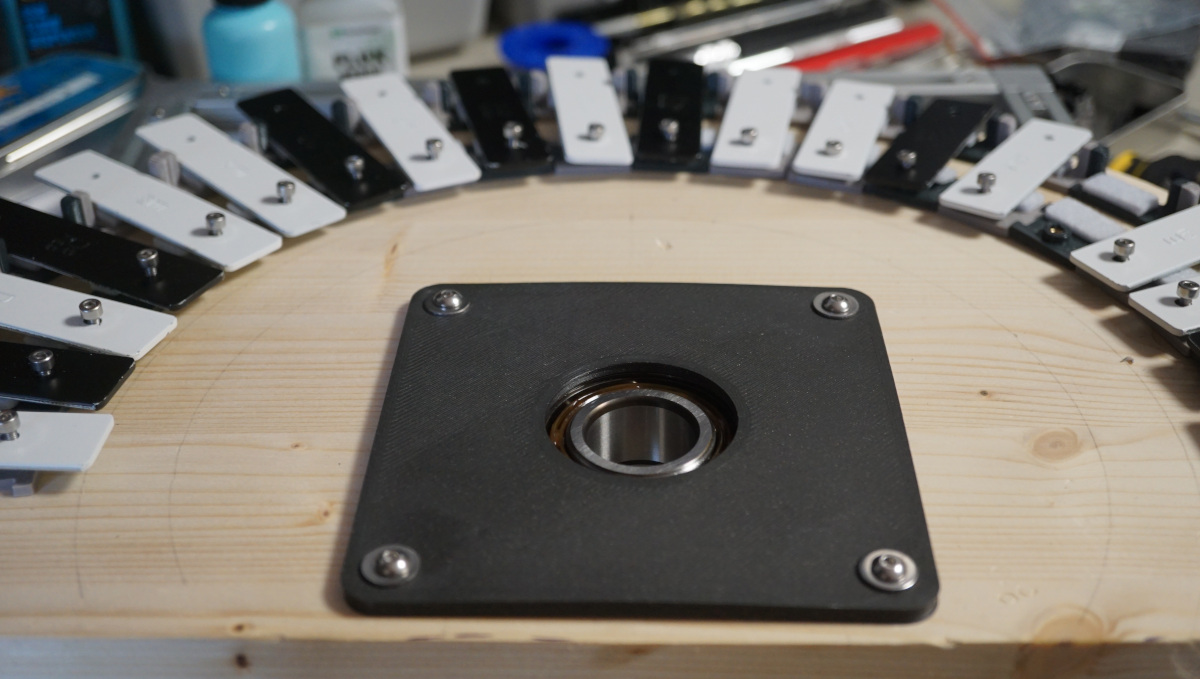
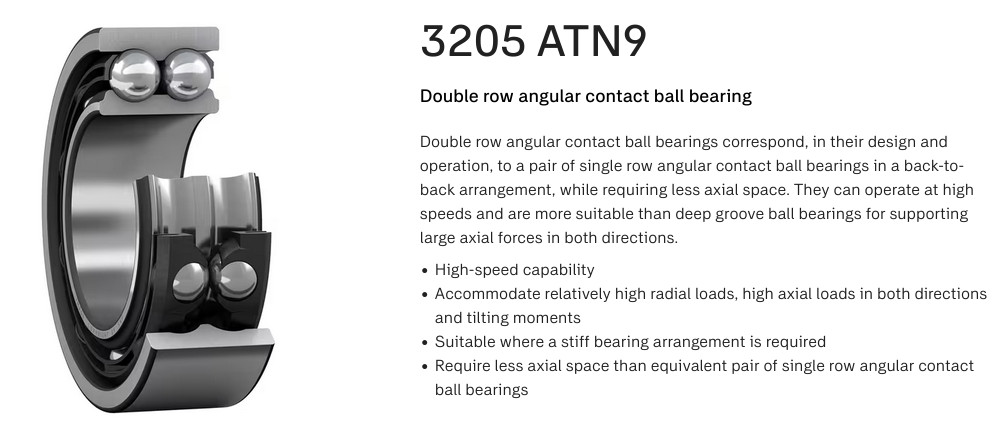
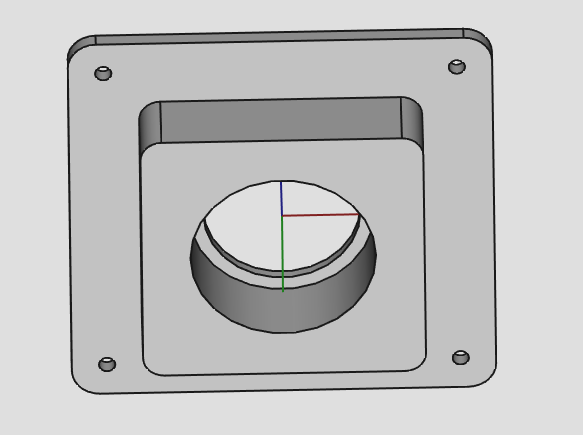
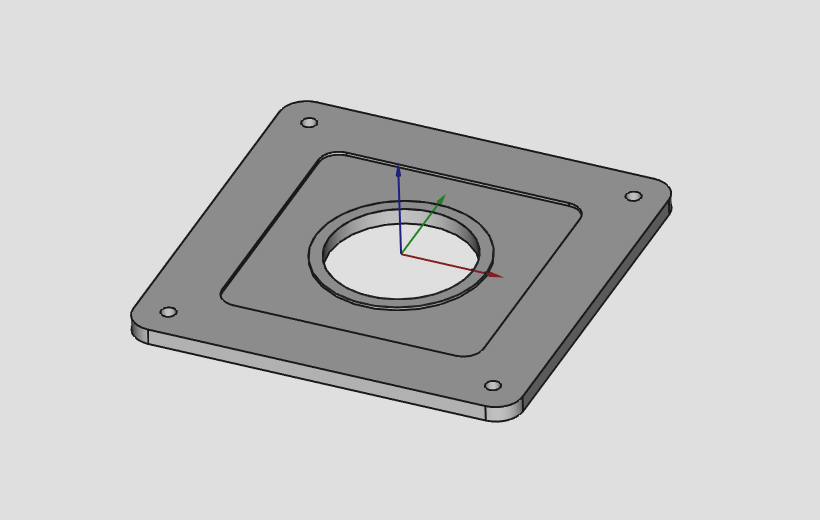
Platformas turēšanai stāv skaists 3205 radiālaksiālais gultnis, kurš šim projektam un tā vieglajai platformai, visdrīzāk, ir overkills, bet jūtas ārkārtīgi patīkami. Tas ir iespiests starp divām no ASA drukātām plāksnēm.
Turpmākie soļi
-
uzmodelēt pašu rotējošo platformu. Tā tiks rotēta ar zobsiksnas palīdzību no NEMA17 steperīša. Noslēgtā zobsiksna un lielāka izmēra zobsiksnas zobrati tuliņ atnāks no Ķīnas draugiem, jo man atvilktnē ir tikai nenoslēgta zobsiksnas lente, un 20T zobrati un gultnīši. Tie gan nodrošina tikai 1:1 pārvadu no stepera, un tas šķiet par strauju un bargu, tomēr galvenais, kas man trūkst, ir noslēgtā zobsiksna,
-
uzinžinierēt neļumīgus solenoīdu/nūjiņu aktuatorus,
-
panākt melodijas nospēlēšanu ar veco arduino,
-
izdomāt īsto elektronisko daļu — es vēl neesmu drošs par to, kādu mikrokontrolieri galu galā vēlos darbināt, lai ļautu detektēt svilpošanas toņus, jo pat nelielai audioapstrādei vajadzīgs vairāk resursu par atmega drupačām. Iespējams, iešu visgarlaicīgāko ceļu, un uzlikšu kontroli uz Raspberry Pi, man te viens mētājas bez darba — bet tai kalnā es kāpšu tad, kad es līdz tam tikšu.