Par ksilofona robotiņu
Mans mazais, mīļais, neveiklais ksilofona spēlējošais robotiņš, mans uni projekts, es uzskatu viņu par pabeigtu. Viņš ir nesteidzīgs un spēlē gana neprecīzi, lai estētiski francūži nāktu man burkšķēt jūtūbē, ka tas taču ir troksnis ne mūzika, būtu labāk ņēmis vālītes pats rokās, un tamlīdzīgas muļķības. Bah!
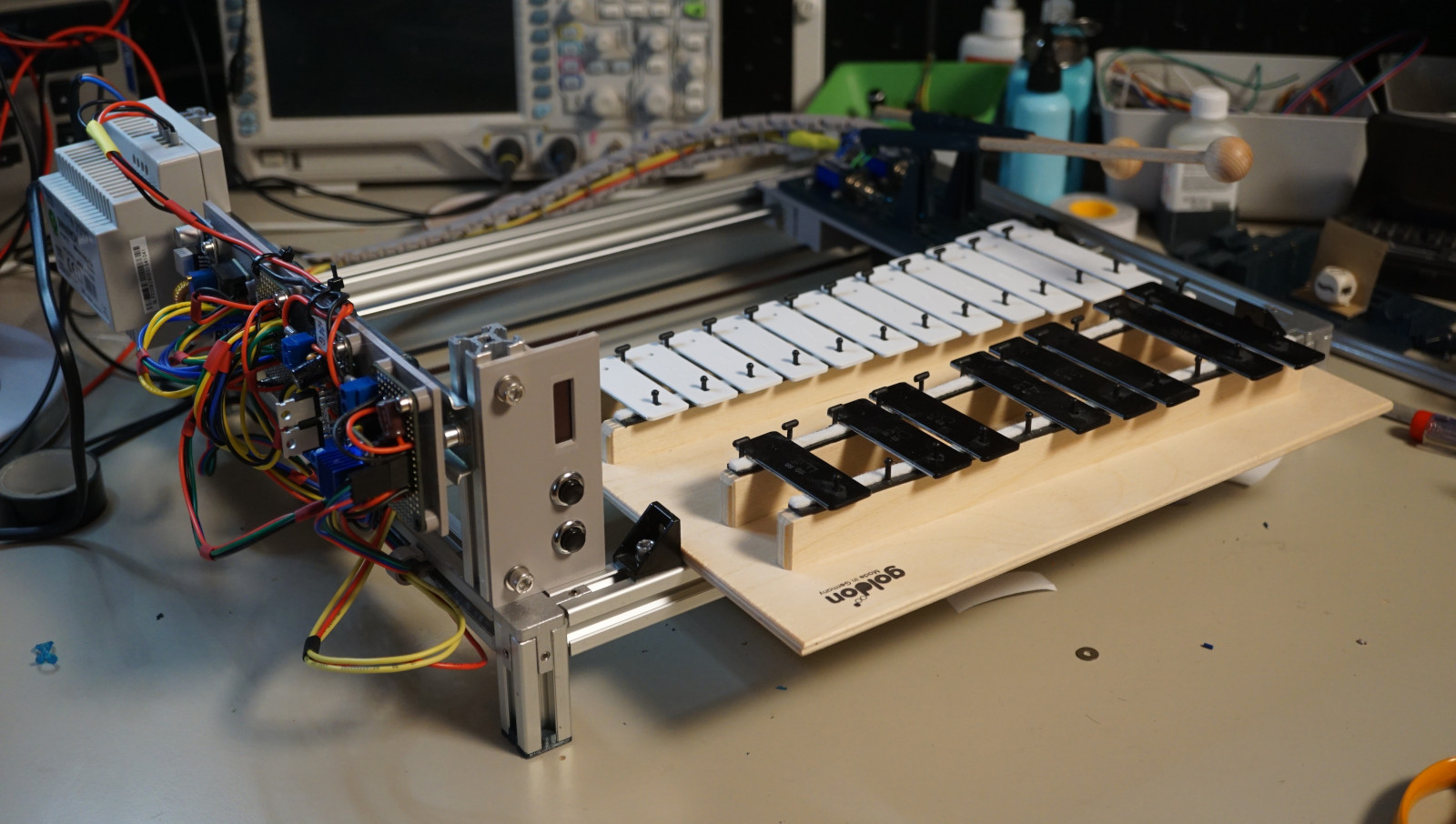
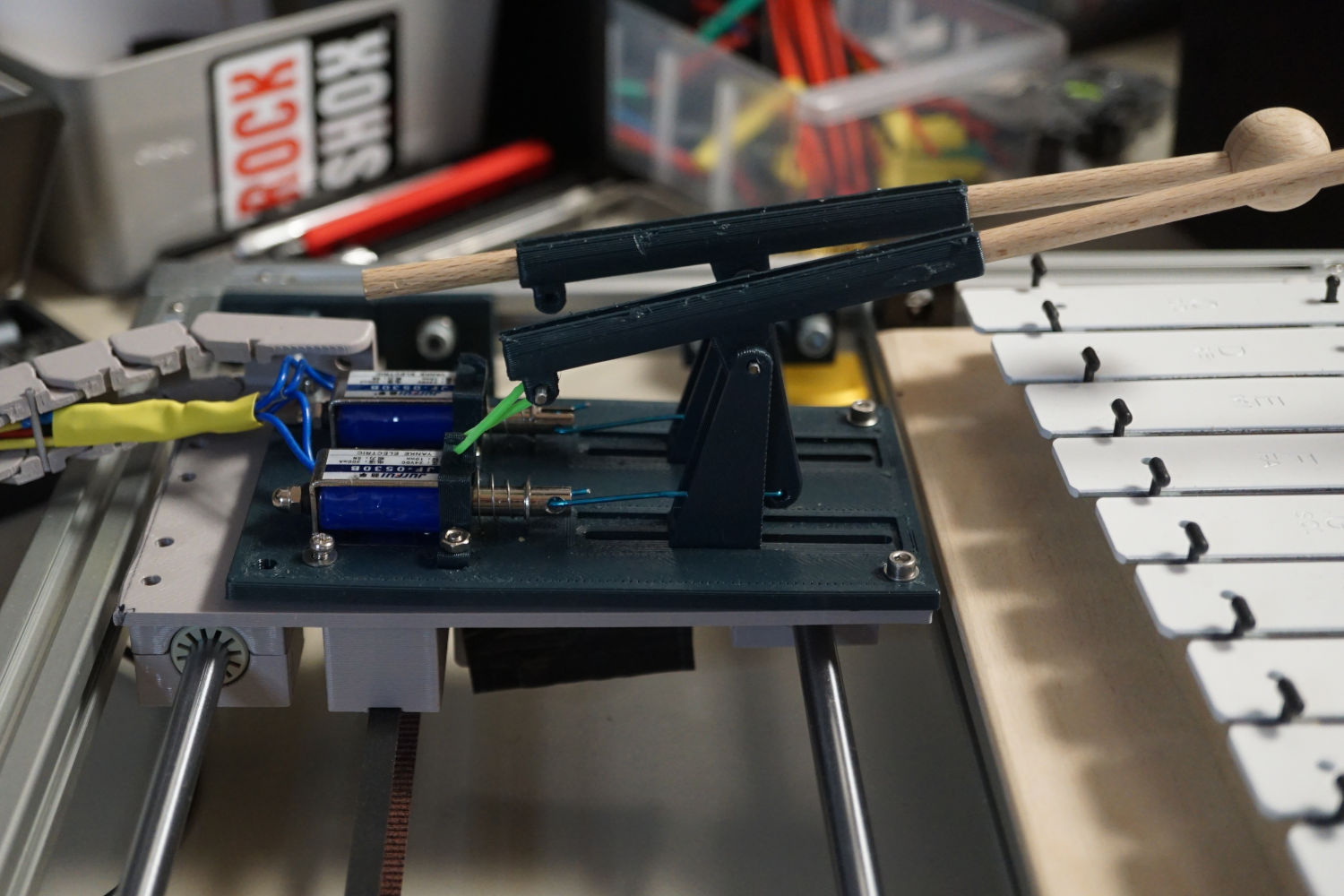
Viens no maniem uzstādījumiem bija, ka esošais ksilofons netiks nekā modificēts vai jaukts ārā, bet tiks lietots neskarts, ievietojot vien manā robotā vālītes. Tas uzlika ierobežojumus arhitektūrai, jo nav vairs daudz citu variantu, kā vālītēm braukāt horizontāli gar ksilofonu. Tāpēc pamatā robotam ir mazs stepera motors (tas ir motors, kura pagriezienu var ļoti precīzi kontrolēt), kurš ar zobsiksnu pārvieto platformu ar vālītēm pa vienu asi šurpu-turpu. Tas ļoti izskatās pēc 3D printera vai cnc mašīnas, jo tas ir klasisks risinājums, kur nav iemesla izgudrot divriteni vēlreiz UN es vēlējos savā projektā iztaustīt arī īstu, industriāla izskata pieaugušo stepera motoru.
2020 profili
Viss pasākums izskatās tik industriāli tāpēc, ka es atklāju 2020 alumīnija profilus. Līdzšinējie projekti man rādīja, ka mokpilna man ir stabila karkasa izveide, un šis lego ir atbilde uz to. Kad ar tiem sāk darboties, tad sāc tos ievērot industriālajā pasaulē visur.
Pamatā ir īpašs 20mm x 20mm alumīnija profils, kuram visās malās ir gropītes. Šos profilus sazāģē nepieciešamajā garumā, un gropītēs liek iekšā — jebkurā vietā — tam paredzētus uzgriežņus, un šī profila standartam ir pieejama plaša kaudze detaļu — stūrīši, leņķīši — lai savstarpēji tos sastiprinātu.
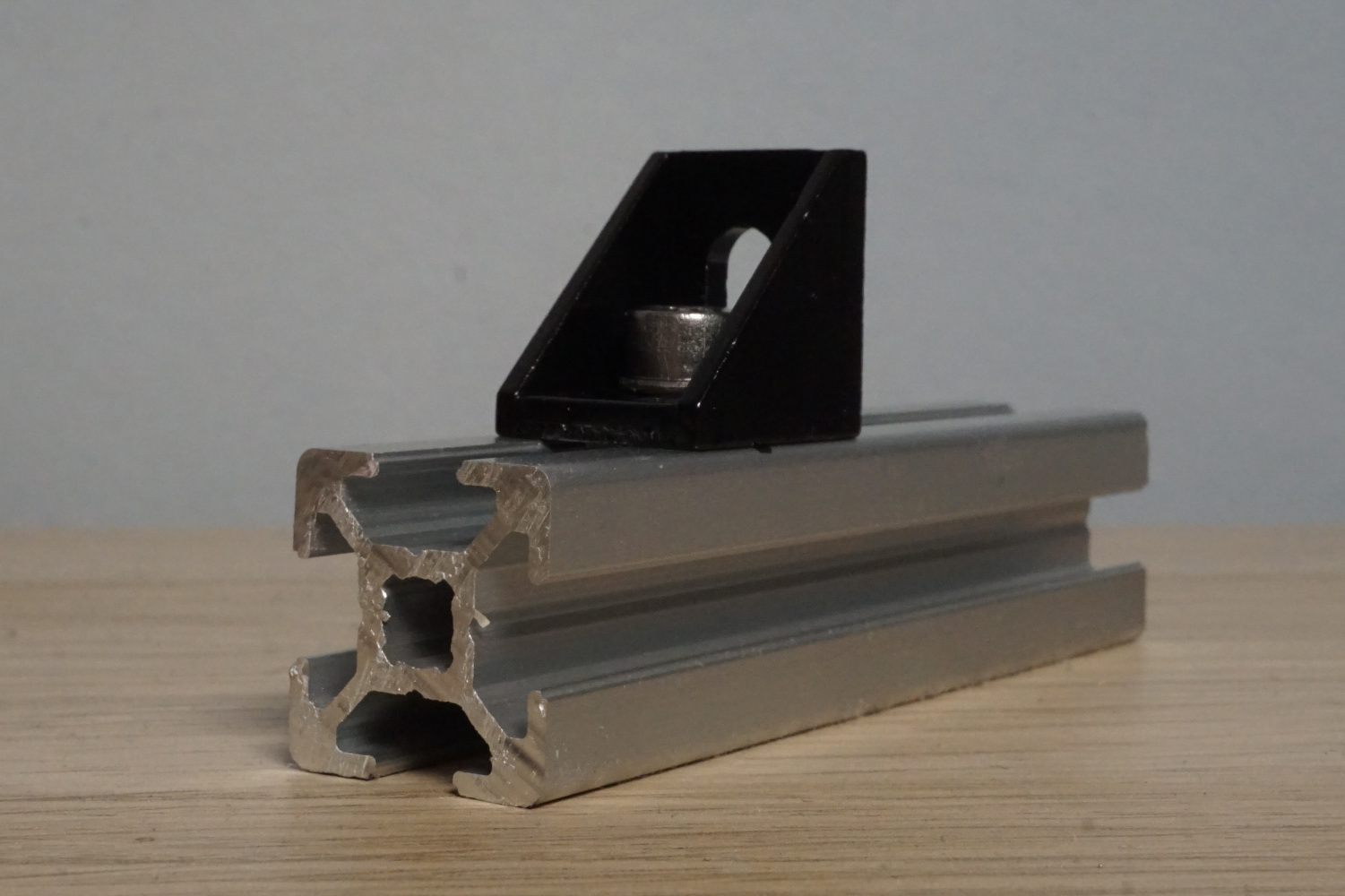
Standartizēta gropīte nozīmē to, ka jebko konstrukcijai var pievienot jebkurā vietā, un pēc tam, nepieciešamības gadījumā, arī pārvietot. Bez papildus caurumu urbšanas! Turētājus var arī uzmodelēt un izprintēt, un 3D modeļu krātuvēs ir kaudzēm palīgrīku, ko izdrukāt, ja pašam negribas modelēt.
Profili ir pieejami arī lielākos izmēros — 2040, 4040, 4080 u.c, kur skaitļi norāda izmēru milimetros, tomēr 2020 ir labs sākuma defaults. Veikalos profili ir divos lāga nesavietojamos standartos, “I type” un “B type”, un tie mazliet atšķiras ar spraugas ģeometriju. Saviem eksperimentiem rekomendēju mesties B (“Bosch”) standartā — tam sprauga ir platāka (6mm) un tas ļauj viegli likt iekšā uzgrieznīšus jau gatavā konstrukcijā un dinamiski eksperimentēt, kamēr “I type” ir šaurāks (5mm) un uzgriežņus tajā varēs laist iekšā tikai pa malu.
Es pasūtīju profilus iekš motedis.com (profili maksā ap 4 eur metrā), kaut kādas papildlietas ņēmu tur, kaut kādas — Ali. Skrūves (M5x8 ir optimāli) gan vislabāk un visātrāk pasūtīt pie mums, delve2.lv ir izcils, ja nepieciešamas kvalitatīvas dažādu veidu skrūvītes nelielos daudzumos.

Vālītes
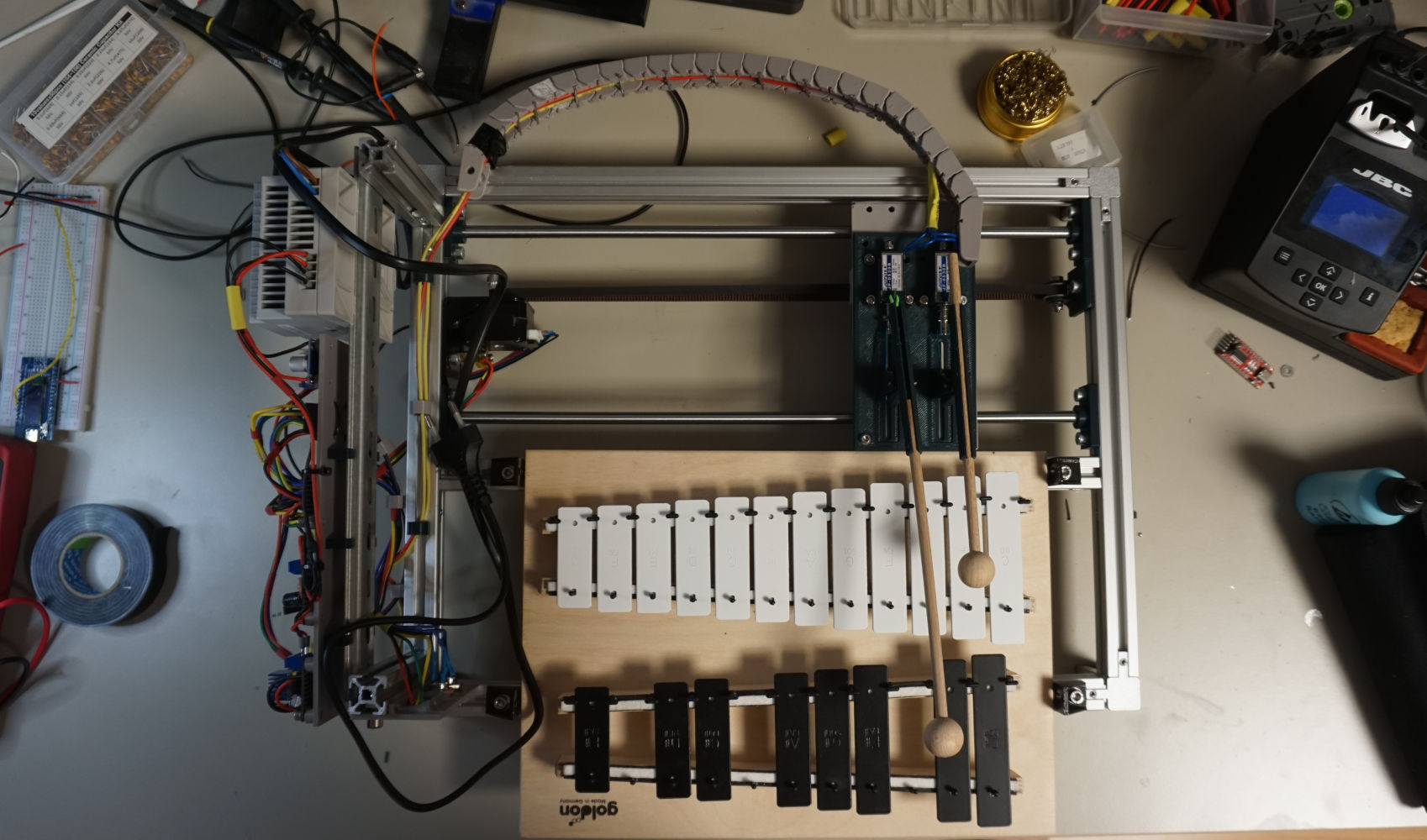
Vālītes rausta divi solenoīdi — elektromagnēti, kuri var kaut ko PARAUT, šai gadījumā — astītes, pie kuras ir piestiprinātas vālītes. Šis ir robota punkts, kuram man vēl pietrūkst materiālu un mehānikas izpratnes, jo, šādai vālītes svirai vicinoties apkārt (melno taustiņu vālītei no rotācijas centra līdz sitienam ir 20cm), vālītes un konstrukcija šķiebjas un lokas, un, uzsitot vietā X, aizbraucot prom, atgriežoties un sitot vēlreiz, nobīde var būt jūtama.
Attāluma noteikšana
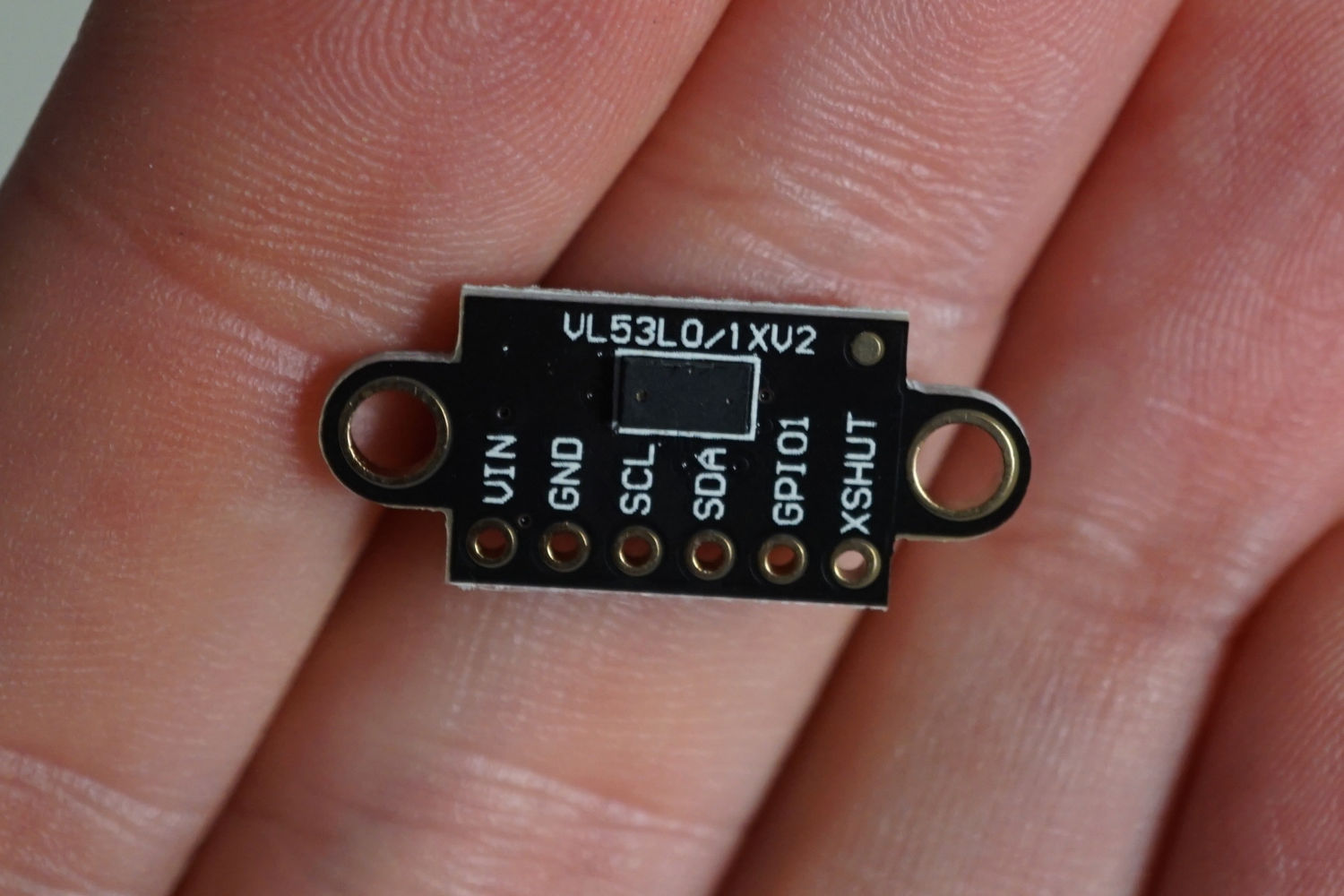
Attāluma noteikšana bija iemesls izvilkt no atvilktnes reiz iegādāto attāluma sensoru. Es izmantoju VL53L0X distances sensoru, un tas ir mazs tehnikas brīnums — šis niecīgais kriksītis izsūta niecīgu lāzerīti un mēra laiku, cik paies, līdz viņa sensors uztvers atstaroto gaismu. Robotā viņš mēra atstarošanos līdz platformas apakšā esošai plāksnītei.
Kāpēc viņš, ja pat 3D printeri neizmanto nekādus sensorus, bet parasti darbojas pēc principa “braucam pa kreisi līdz atdurei, piefiksējam pozīciju, pēc tam braucam pa labi līdz atdurei, piefiksējam pozīciju”? Izņemot acīmredzamo caurstrāvojošo motivāciju “es gribēju izmantot fancy sensoru”, otra motivācija bija tas, ka, universitātes kontekstā, likās forši taisīt adaptīvu algoritmu, kurš ik brīdi zinās savu pozīciju un, nevis tikai nojautīs to, bet būs precīzi nolasījis.
Sensora lasījumi izrādījās visai trokšņaini, un precizitāte nepietiekoša — nepārtraukti lasot attālumu, tas variē vairāku centimetru robežās. Apvienojot to ar vālīšu vicināšanās izraisītajām deformācijām, precizitāte ir tāda, kāda nu viņa ir, grr.
Elektronika
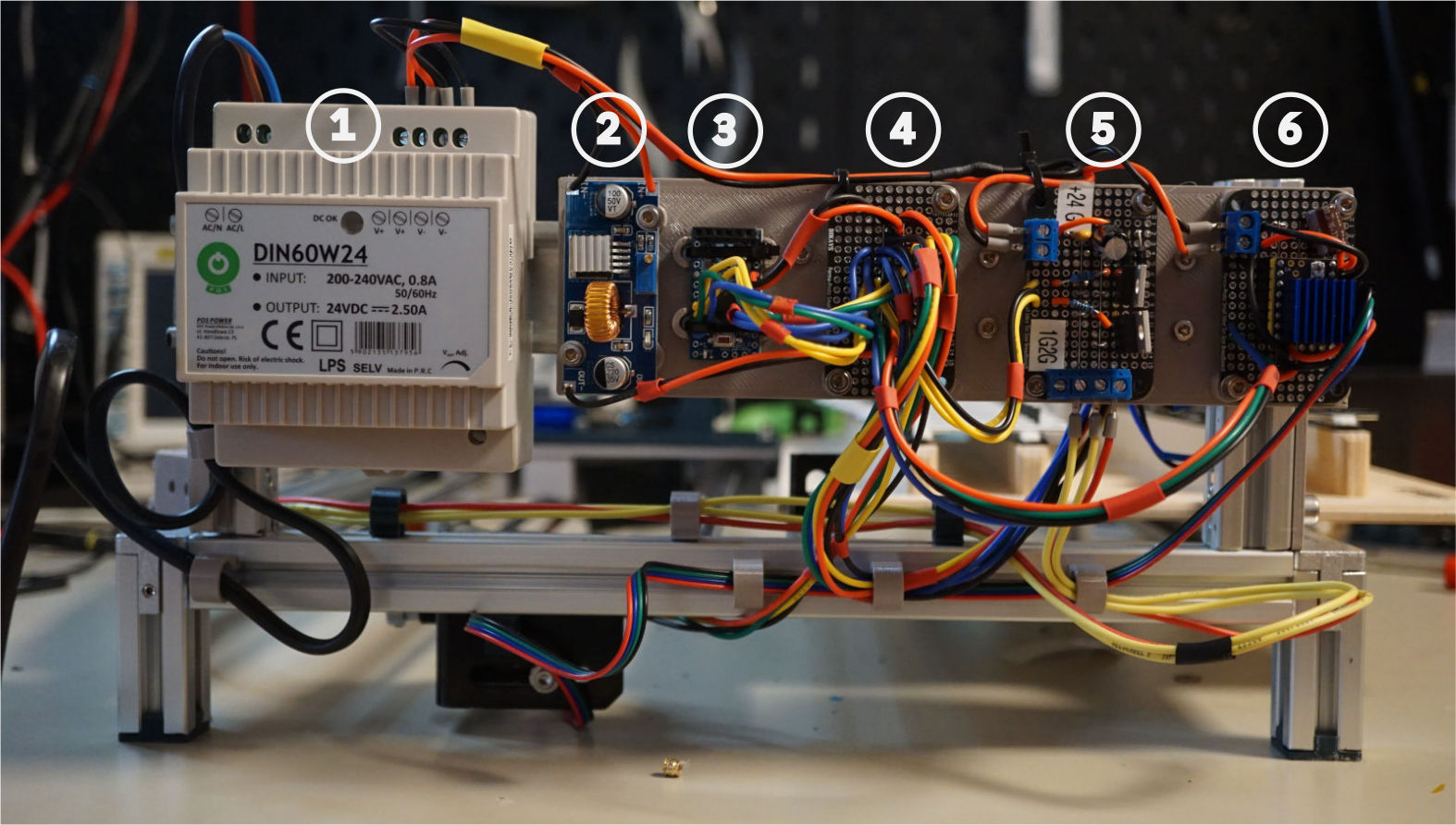
Viss glīti uzmontēts uz DIN sliedes. Ja kaut ko var uzmontēt uz DIN sliedes, tad to vajag uzmontēt uz DIN sliedes! Tas visam piedod papildus industriālisma un nopietna projekta pieskaņu.
No kreisās uz labo:
-
24V DIN barošanas bloks. Industriālam projektam — industriāla barošana! Glīts barošanas bloks ir puse no veiksmīga projekta, un man ļoti patīk kā izskatās DIN sliedes barošanas bloki.
-
Barošanas pārveidotājs 24V→5V mikrokontrolierim,
-
Pats mikrokontrolieris — Arduino Pro Mini 5V/16MHz klons no ķīniešu veikala. Tas ir minimālistisks dēlītis bez USB un citām nevajadzīgām lietām, un es esmu sens un man ļoti patīk mazi, minimāli un pilnībā aptverami kontrolieri, nevis šitās visas mūsdienu “tur griežas linux un programmēsim AI javaskriptā” vaļības.
-
Nākamā platīte ir komutācijas dēlītis. Katram modulim vajag zemi un barošanu, un tās mērķis ir padarīt mikrokontroliera savienojumus ērtus lietošanā.
-
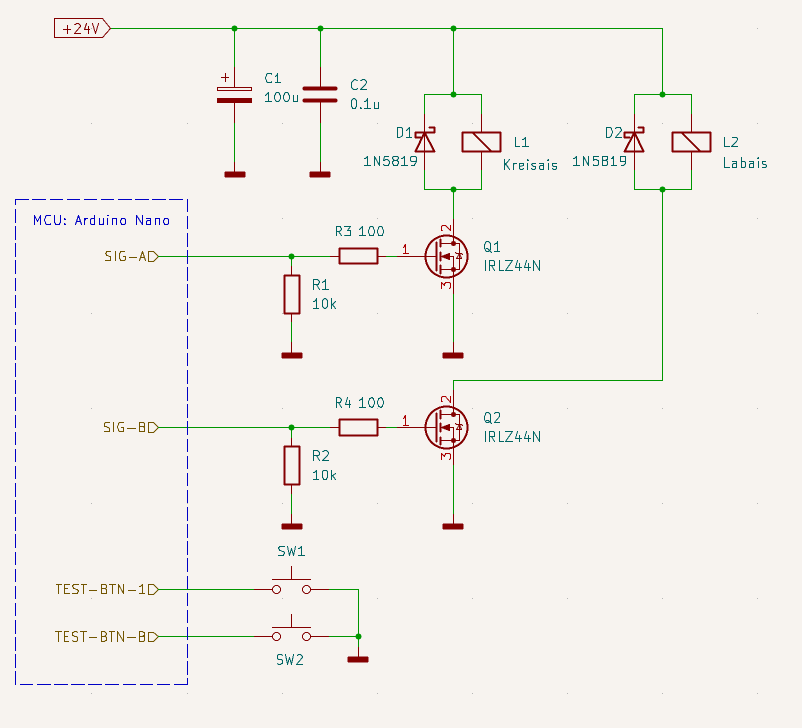
Aiz komutācijas dēlīša spīd solenoīdu kontrolieris. Viņš ir tas, kurš pēc mikrokontroliera signāla slēdz iekšā elektromagnētus — var ieraudzīt divus lielus IRLZ44N mosfetus, kuri ir tie, kas slēdz solenoīdus iekšā. Eku, shēma:
-
TMC2209 stepera kontrolieris. Lai precīzi, maziem solīšiem, pagrieztu stepera motoriņu, kurā iekšā ir, būtībā, vien divas spoles, ir nepieciešamas mazas smadzenītes, un šis kontrolieris tās nodrošina. Tu viņam saki “eu, pakusties”, un viņš kustina motoriņu. Ērti!
-
(redzams tikai kopskatā) Maza statusa/atkļūdošanas platīte, kas satur mazītiņu 128x32px displeju un divas pogas.
Vadiņi varbūt izskatās mazliet haotiski, bet viņos ir dzelžaina kārtība un pat krāsu kodējums. Visas zemes ir melnas, visas barošanas — sarkanas, un dažādi signāli ir dažādās krāsās.
Tāds nu viņš man šobrīd ir, mīļš un pilns ar trūkumiem. Man nepatīk smagās vālītes un, ja vēlētos kaut ko muzikālāku, tieši taustiņu sitējs ir punkts, kuru pārdomāt. Varbūt kādas vieglas vālītes un rotējošu vārpstiņu ar izcilni?
Attāluma sensoram nav ne vainas sākotnējai kalibrācijai: ar atkārtotiem lasījumiem tas labi nosaka lokāciju, bet nepietiek precizitātes, lai lasītu to kustībā.
Bet šim projektiņam tas ir pilnīgi ok. Un tas ir pabeigts. Viss! Jāķeras pie kā nākošā.